-
1 Zeitempfang
сущ.астр. приём сигналов времени -
2 Zeitsignalempfang
сущ.астр. приём сигналов времени -
3 Zeitempfang
астр. приём сигналов времени -
4 Zeitsignalempfang
астр. приём сигналов времениDeutsch-Russisch Wörterbuch der Astronomie > Zeitsignalempfang
-
5 speicherprogrammierbare Steuerung, f
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего. Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы. Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7. Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series. Рис. 4. Резервированный контроллер FCP270.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA). Рис. 5. Контроллер AC800M.
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Немецко-русский словарь нормативно-технической терминологии > speicherprogrammierbare Steuerung, f
6 Durchflußmeßgerät
расходомер
Устройство, которое показывает объемный расход определенного газа или газовой смеси
[ ГОСТ Р 52423-2005]Тематики
- ингаляц. анестезия, искусств. вентиляц. легких
EN
DE
FR
расходомер жидкости (газа)
расходомер
Ндп. измеритель расхода жидкости (газа)
Измерительный прибор или совокупность приборов, предназначенных для измерения расхода жидкости (газа).
[ ГОСТ 15528-86]Расходомеры, служат для измерения объема (объемный расход) или массы (массовый расход) жидкостей, газов и паров, проходящих через заданное сечение трубопровода в единицу времени. Иногда расходомеры снабжают интеграторами, или счетчиками - устройствами для суммирования измеряемых объемов или масс контролируемых сред в течение заданного промежутка времени. Расходомеры разных типов рассчитаны на измерения в определенной области расходов (рис. 1).
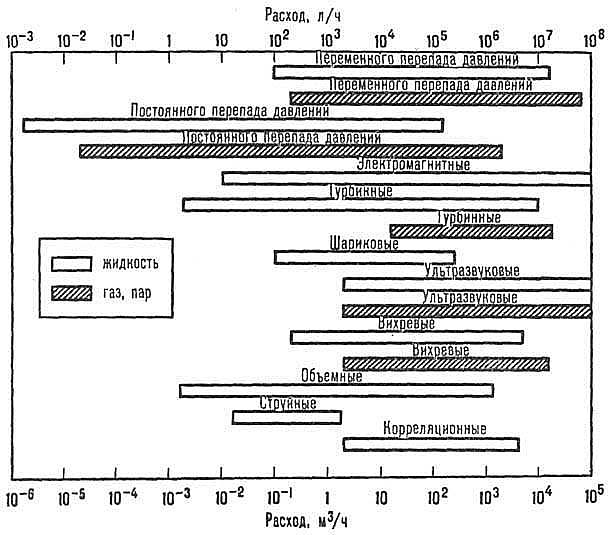
Рис. 1. Диапазоны измерений расходов жидкостей, газов и паров разными расходомерами.
Основные показатели, обусловливающие выбор расходомера: значение расхода; тип контролируемой среды, ее температура, давление, вязкость, плотность, электрическая проводимость, рН; перепад давлений на первичном измерительном преобразователе (датчике); диаметр трубопровода; диапазон (отношение максимального расхода к минимальному) и погрешность измерений. В зависимости от физ.-химических свойств измеряемой и окружающей сред в расходомеры используются различные методы измерений.
В данной статье рассматриваются наиболее важные типы расходомеры и счетчиков, применяемых в химических лабораториях, химических и смежных отраслях промышленности для высокоточных контроля и учета химических веществ при их производстве, выдаче и потреблении, а также в системах автоматизированного управления технологическими процессами.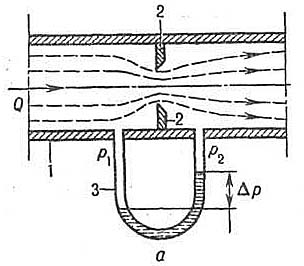
Расходомеры переменного перепада давлений (рис. 2, а). Действие их основано на зависимости перепада давлений на гидравлическом сопротивлении (диафрагмы, сопла и трубы Вентури, сопла Лаваля и др.), расположенном в потоке контролируемой среды, от ее расхода Q. Измерения разности давлений Dp = p1 - p2 осуществляются на прямолинейном участке трубопровода (длиной до 10 и не менее 5 диаметров соответственно до и после гидравлического сопротивления). Расходомеры данного типа особенно распространены благодаря следующим достоинствам: простоте конструкции и возможности измерений в широком диапазоне значений расхода и диаметров трубопроводов (от десятков до 3000 мм и более); возможности применения для различных по составу и агрессивности жидкостей и газов при температурах до 350-400 °С и давлениях до 100 МПа; возможности расчетным путем определять расход без натурной градуировки расходомеры в случае трубопроводов диаметрами 50-1000 мм. Недостатки: небольшой диапазон измерений из-за квадратичной зависимости между расходом и перепадом давлений (3:1); значительные потери давления на гидравлическом сопротивлении и связанные с этим дополнительные затраты энергии. Погрешность 1,5-2,5% от макс. расхода.
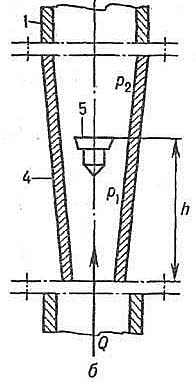
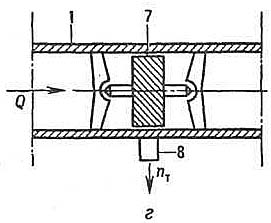
Расходомеры постоянного перепада давлений, или ротаметры ( рис. 2, б). В этих приборах измеряется прямо пропорциональная расходу величина перемещения поплавка h внутри конической трубки под воздействием движущегося снизу вверх потока контролируемой среды. Последний поднимает поплавок до тех пор, пока подъемная сила, возникающая благодаря наличию на нем перепада давлений, не уравновесится весом поплавка. Трубки ротаметров могут быть стеклянными (рассчитаны на давление до 2,5 МПа) и металлическими (до 70 МПа). Поплавки в зависимости от свойств жидкости или газа изготовляют из различных металлов либо пластмасс. Приборы работоспособны при температурах от — 80 до 400 °С, предпочтительны для трубопроводов диаметром до 150 мм, имеют равномерные шкалы, градуированные в единицах объемного расхода. Достоинства: возможность измерений расхода жидкостей и газов от весьма малых значений (0,002 л/ч по воде, 0,03 л/ч по воздуху) до высоких (150-200 и до 3000 м3/ч); широкий диапазон измерений (10:1); малые потери давления (до 0,015 МПа). Погрешность 0,5-2,5% от макс. расхода.
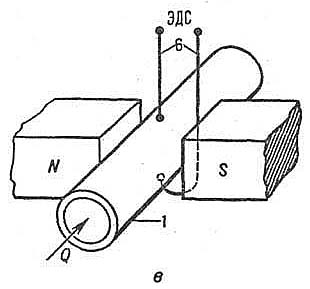
Электромагнитные расходомеры (рис. 2, в). Действие их основано на прямо пропорциональной зависимости расхода от эдс, индуцированной в потоке электропроводной жидкости (минимальная удельная электрическая проводимость 10-3-10-4 См/м), движущейся во внеш. магнитное поле, которое направлено перпендикулярно оси трубопровода. Эдс определяется с помощью двух электродов, вводимых в измеряемую среду диаметрально противоположно через электроизоляционное покрытие внутри поверхности трубопровода. Материалы покрытий - резины, фторопласты, эпоксидные компаунды, керамика и другие. Приборы позволяют измерять расход различных пульп, сиропов, агрессивных и радиоактивных жидкостей и т. д. при давлениях обычно до 2,5 МПа (иногда до 20 МПа); диаметр трубопроводов, как правило, 2-3000 мм. Во избежание поляризации электродов измерения проводят в переменном магнитном поле. Допустимые температуры контролируемой среды определяются термостойкостью электроизоляционных покрытий и могут достигать, как правило, 230 °С. При измерении расхода жидких металлов (например, Na, К и их эвтектик) указанные температуры обусловлены термостойкостью используемых конструкционных материалов, в первую очередь магнитов, создающих постоянное магнитное поле (исключает возникновение в металлах вихревых токов) и составляют 400-500 °С; в данном случае трубопроводы не имеют внутренней изоляции, а. электроды привариваются непосредственно к их наружным поверхностям. Достоинства: высокое быстродействие; широкий диапазон измерений (100:1); отсутствие потерь давления (приборы не имеют элементов, выступающих внутрь трубопровода); показания приборов не зависят от вязкости и плотности жидкостей. Погрешность 0,5-1,0% от измеряемой величины.
Тахометрические расходомеры В турбинных расходомерах (рис. 2, г) используется зависимость измеряемой тахометром частоты вращения турбинки, приводимой в движение потоком среды (нефтепродукты, растворы кислот и щелочей, нейтральные или агрессивные газы) от ее расхода. Турбинки могут размещаться аксиально либо тангенциально по отношению к направлению движения потока. Диаметр трубопроводов 4-4000 мм; вязкость среды 0,8-750 мм2/с; температура от -240 до 550 °С, давление до 70 МПа; диапазон измерений до 100:1; потери давления 0,05 МПа. Погрешность 0,5-1,5% от макс. расхода.
В шариковых расходомерах контролируемая жидкая среда закручивается с помощью неподвижного винтового направляющего аппарата и увлекает за собой металлический шарик, заставляя его вращаться внутри трубопровода (перемещению вдоль оси препятствуют ограничит. кольца). Мера расхода - частота вращения шарика, измеряемая, например, тахометром. Диаметр трубопроводов 5-150 мм; температура среды от -30 до 250 °С, давление до 6,4 МПа; диапазон измерений 10:1; потери давления до 0,05 МПа. В этих приборах в отличие от турбинных отсутствуют опорные подшипники, что позволяет измерять расход жидкостей с механическими включениями и увеличивает ресурс работы. Погрешность не более 1,5% от максимального расхода.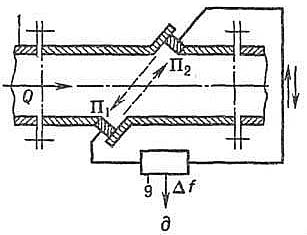
Ультразвуковые расходомеры (рис. 2, д). В основу их работы положено использование разницы во времени прохождения ультразвуковых колебаний (более 20 кГц) в направлении потока контролируемой среды и против него. Электронное устройство формирует электрический импульс, поступающий на пьезоэлемент П1, который излучает электромеханические колебания в движущуюся среду. Эти колебания воспринимаются через некоторое время пьезоэлементом П2, преобразуются им в электрический импульс, попадающий в электронное устройство и снова направляемый им на пьезоэлемент П1 и т.д. Контур П1-П2 характеризуется частотой f1 повторений импульсов, прямо пропорциональной расстоянию между пьезоэлементами и обратно пропорциональной разности между скоростью распространения звука в контролируемой среде и скоростью самой среды. Аналогично электронное устройство подает импульсы в обратном направлении, то есть от пьезоэлемента П2 к пьезоэлементу П1. Контур П2-П1 характеризуется частотой f2 повторений импульсов, прямо пропорциональной расстоянию между пьезоэлементами и обратно пропорциональной сумме скоростей распространения звука в среде и самой среды. Далее электронное устройство определяет разность Df указанных частот, которая пропорциональна скорости (расходу) среды.
Эти приборы не вызывают потерь давления, обладают высоким быстродействием и обеспечивают измерение пульсирующих расходов (частота 5-10 кГц) любых не содержащих газовых включений жидкостей (в т. ч. вязких и агрессивных), а также газов и паров. Диаметр трубопроводов 10-3000 мм и более; температура среды от —40 до 200°С (реже-от —250 до 250 °C), давление до 4 МПа; диапазон измерений 100:1. Погрешность 1,0-2,5% от макс. расхода.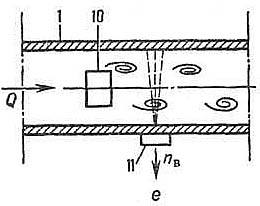
Вихревые расходомеры (рис. 2, е). Действие их основано на зависимости между расходом и частотой возникновения вихрей за твердым телом (например, металлическим прямоугольным стержнем), которое расположено в потоке жидкости или газа. Образованию вихрей способствует поочередное изменение давления па гранях этого тела. Диапазон частот образования вихрей определяется размером и конфигурацией тела и диаметром трубопроводов (25-300 мм). Температура среды обычно от - 50 до 400 °С, реже от -270 до 450 °С; давление до 4 МПа, иногда до -6,3 МПа; диапазон измерений: для жидкостей 12:1, для газов 40:1. Градуировка приборов не зависит от плотности и вязкости контролируемой среды, а также от ее температуры и давления. Погрешность 0,5-1,0% от измеряемой величины при числах Рейнольдса Re > 30000; при Re < 10000 определение расхода практически невозможно из-за отсутствия вихрей.
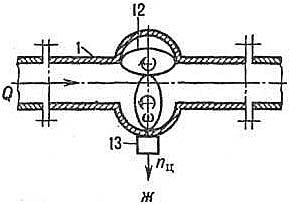
Объемные расходомеры (рис. 2,ж). В качестве измерителей объема служат счетчики с цилиндрическими или овальными шестернями, поршневые, с плавающей шайбой, лопастные, винтовые и другие. Они снабжены устройствами выдачи сигналов, пропорциональных объемному расходу вещества. Эти приборы пропускают определенный объем жидкости за один цикл хода чувствительного элемента. Мера расхода - число таких циклов. Диаметр трубопроводов 15-300 мм; температура среды до 150°С, давление до 10 МПа; диапазон измерений до 20:1. Основное достоинство - стабильность показаний. Недостатки: необходимость установки фильтров, задерживающих твердые частицы (чувствительный элемент при их проникновении может выйти из строя); износ движущихся деталей, приводящий к увеличению погрешности показаний, которая обычно составляет 0,5-1,0 от измеряемой величины.
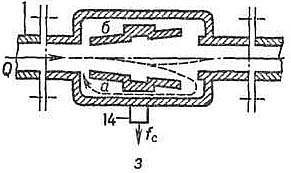
Струйные расходомеры (рис. 2,з). В них используется принцип действия генератора автоколебаний. В приборе часть струи потока жидкости или газа ответвляется и через так называемый канал обратной связи а поступает на вход устройства, создавая поперечное давление на струю. Последняя перебрасывается к противоположной стенке трубопровода, где от нее снова ответвляется часть потока, подаваемая через канал б на вход прибора; в результате струя переходит в первоначальное положение и т. д. Такой переброс происходит с частотой, пропорциональной расходу контролируемой среды, и сопровождается изменением давления в каналах а и б, что позволяет датчику давления воспринимать автоколебания. Диаметр трубопроводов 2-25 мм; температура среды от —263 до 500 °С, давление до 4 МПа; диапазон измерений 10:1. Основное достоинство - отсутствие подвижных элементов. Погрешность-1,5% от макс. расхода.
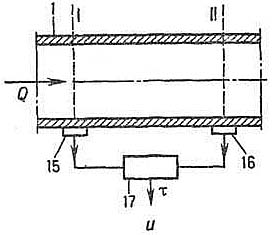
Корреляционные расходомеры (рис. 2, и). В этих приборах с помощью сложных ультразвуковых и иных устройств осуществляется запоминание в заданном сечении трубопровода (I) характерного "образа" потока контролируемой среды и его последнее распознавание в другом сечении (II), расположенном на определенном расстоянии от первого. Мера расхода - время прохождения "образом" потока участка трубопровода между сечениями. Диаметр трубопроводов 15-900 мм; температура среды до 100-150°С, давление до 20 МПа; диапазон измерений 10:1. Достоинства: независимость показаний от изменений плотности, вязкости, электропроводности и других параметров жидкости; отсутствие потерь давления. Погрешность 1 % от измеряемой величины.
[ http://www.chemport.ru/data/chemipedia/article_3233.html]
Недопустимые, нерекомендуемые
Тематики
Синонимы
EN
DE
FR
14. Расходомер жидкости (газа)
Расходомер
Ндп. Измеритель расхода жидкости (газа)
D. Durchflußmeßgerät
E. Flowmeter
F. Débitmètre
Измерительный прибор или совокупность приборов, предназначенных для измерения расхода жидкости (газа)
Источник: ГОСТ 15528-86: Средства измерений расхода, объема или массы протекающих жидкости и газа. Термины и определения оригинал документа
Немецко-русский словарь нормативно-технической терминологии > Durchflußmeßgerät
См. также в других словарях:
Оптимальный приём сигналов — У этого термина существуют и другие значения, см. Сигнал (значения). Оптимальный приём сигналов область радиотехники, в которой обработка принимаемых сигналов осуществляется на основе методов математической статистики[1] … Википедия
ПРИЁМНИКИ ЗВУКА — акустич. приборы для восприятия звуковых сигналов и преобразования их с целью измерения, передачи, воспроизведения, записи или анализа. Наиболее распространены П. з., преобразующие акустич. сигналы в электрические (см. ЭЛЕКТРОАКУСТИЧЕСКИЙ… … Физическая энциклопедия
Приёмник воздушного давления — самолёта Rockwell MBB X 31 … Википедия
Приёмники излучения — устройства для преобразования сигналов электромагнитного излучения (См. Излучение) (в диапазоне от рентгеновских лучей с длиной волны λ = 10 9 см до радиоволн с λ = 10 1 см, о приёмниках электромагнитного излучения с меньшей длиной волны… … Большая советская энциклопедия
Приёмники звука — акустические приборы для восприятия звуковых сигналов и преобразования их с целью измерения, передачи, воспроизведения, записи или анализа. Наиболее распространены П. з., преобразующие акустические сигналы в электрические (см.… … Большая советская энциклопедия
Гравитационное замедление времени — В физике, гравитационное красное смещение является проявлением эффекта изменения частоты света (вообще говоря, любых электромагнитных волн) по мере удаления от массивных объектов, таких как звёзды и чёрные дыры; оно наблюдается как сдвиг… … Википедия
Цифровая обработка сигналов — (ЦОС, DSP англ. digital signal processing) преобразование сигналов, представленных в цифровой форме. Любой непрерывный (аналоговый) сигнал может быть подвергнут дискретизации по времени и квантованию по уровню (оцифровке), то… … Википедия
Служба времени — совокупность специализированных лабораторий научно исследовательских институтов, обсерваторий и других учреждений (или одна из них), осуществляющих определение и хранение времени и передачу информации о нём заинтересованным потребителям.… … Большая советская энциклопедия
Квантование (обработка сигналов) — У этого термина существуют и другие значения, см. Квантование. Квантованный сигнал … Википедия
Децимация (обработка сигналов) — У этого термина существуют и другие значения, см. Децимация. Децимация (от лат. decimatio, от decem «десять») уменьшение частоты дискретизации дискретного во времени сигнала путем удаления его отсчетов. Отсчёт численное… … Википедия
Измерительный приёмник — радиоприёмник с нормированными метрологическими характеристиками измерения уровня и частоты радиосигналов. Основное назначение их селективное измерение напряжения или мощности слабых сигналов, у многих современных приёмников есть также… … Википедия
 18+© Академик, 2000-2024
18+© Академик, 2000-2024- Обратная связь: Техподдержка, Реклама на сайте
Экспорт словарей на сайты, сделанные на PHP, Joomla, Drupal, WordPress, MODx.